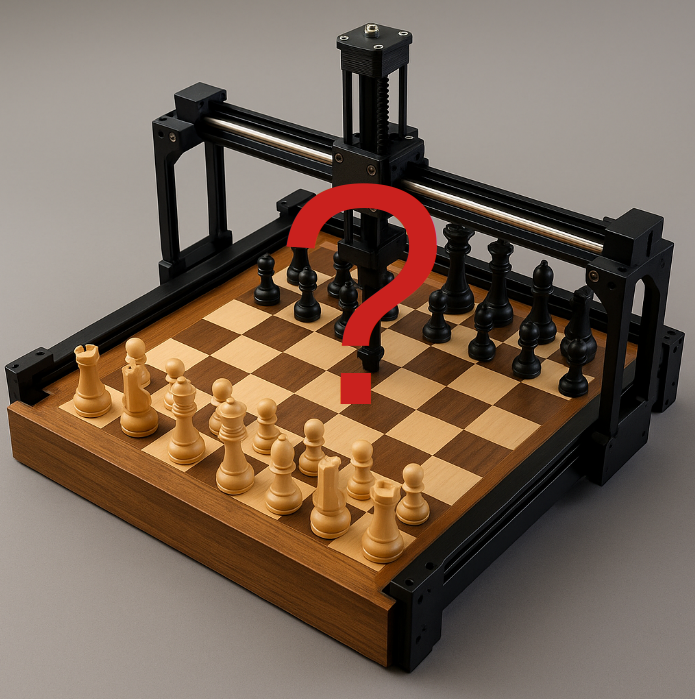
Chess-Playing Robot — Plotter / Kitten Chaser
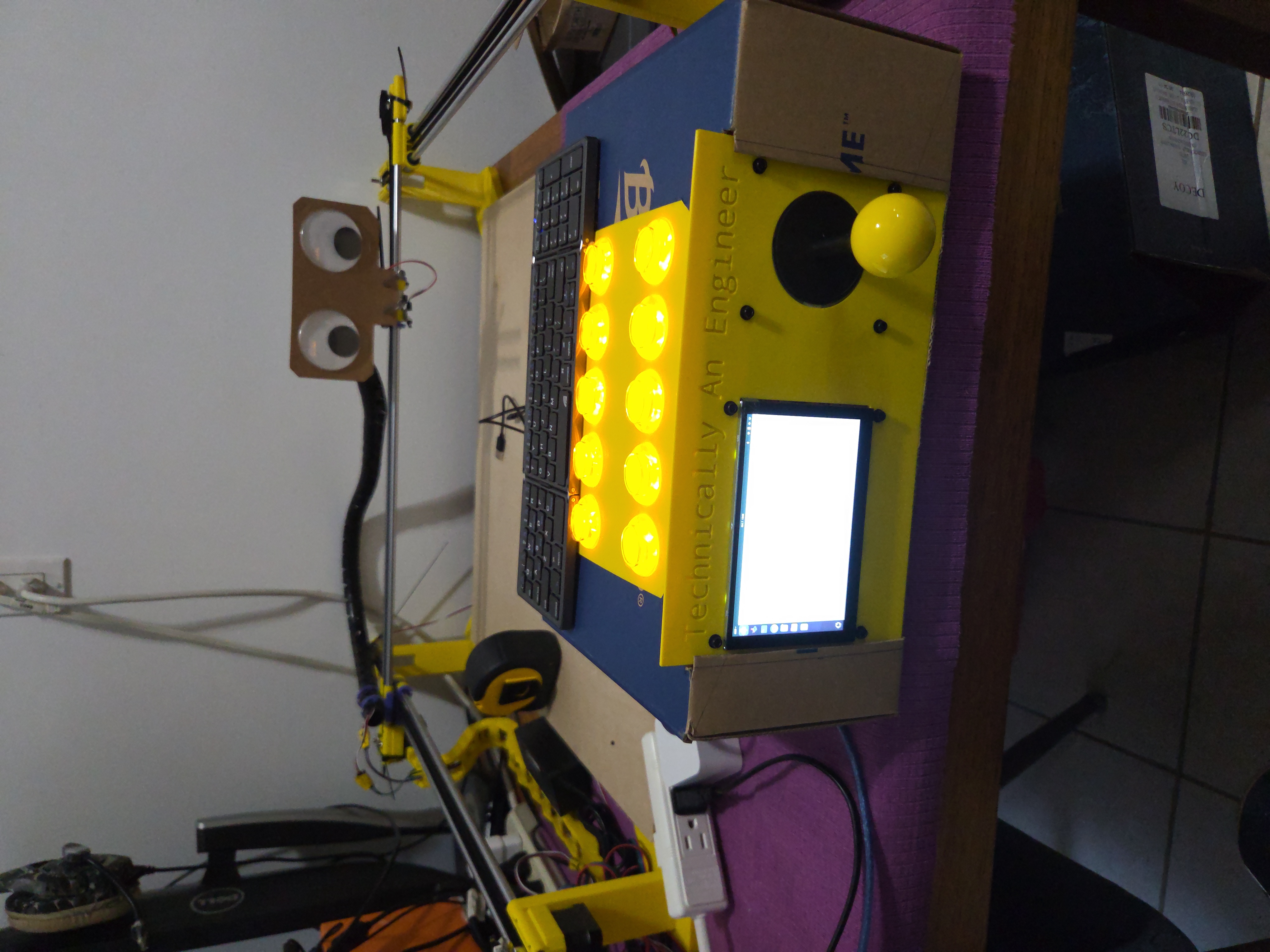
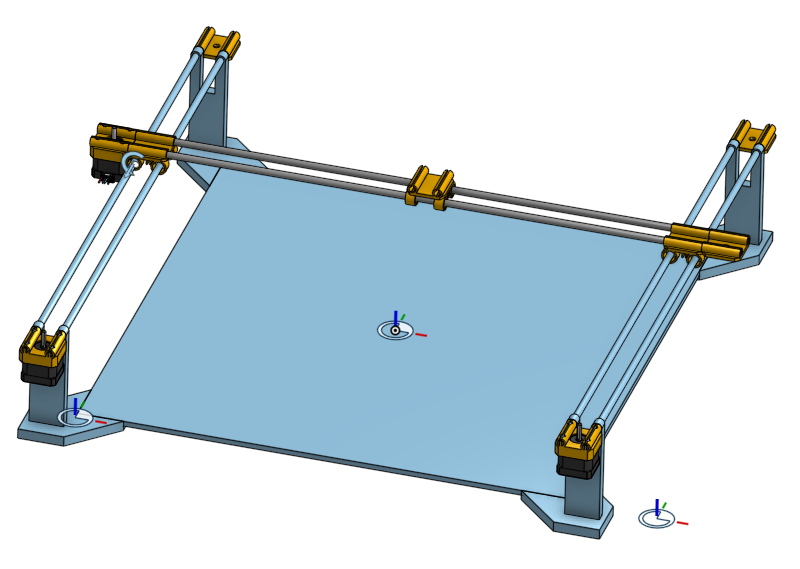
Turning the chess-robot gantry into a fast, reliable pen plotter (and accidental kitten magnet). Modeled a servo-lift pen head, added dual Y-axis steppers, and used Universal G-code Sender to draw on a whiteboard.