NASA Guided Parachute
NASA Guided Parachute — Designed and tested a steerable parachute system to reduce the impact energy of failed drones over populated areas. Led a team of 12 engineering students at NASA Langley Research Center to prototype a controllable Rogallo-wing design capable of guided descent and soft landing.
NASA Langley Aeronautics Academy – Research Project
Developed as part of the UAS Safety Initiative for the NASA Aeronautics Research Mission Directorate.
Safety of Drone Flight Over People
Overview
This project, conducted at NASA Langley Research Center’s Aeronautics Academy, explored the use of guided parachutes to reduce the kinetic energy of falling drones and steer them toward safe landing zones.
The goal was to enable drone flight over populated areas without risking injury in the event of system failure.
As Lead Research Associate, I worked with a team of twelve student engineers and physicists to design, build, and test a controllable parachute system.
In just eight weeks, we went from concept and trade studies to a working prototype that could steer itself during descent.
Key Highlights
- Objective: Reduce impact energy of a 75-lb drone falling from 400 ft from ~30,000 ft·lb to ≤ 58 ft·lb
- Approach: Rogallo-wing parachute with differential line control for steering
- Prototype Scale: 3.3 lb test model demonstrating stable glide and turn response
- Environment: NASA Langley Research Center – Aeronautics Research Mission Directorate
- Outcome: Validated feasibility of steerable parachutes as a low-cost injury-mitigation system
Motivation
As drones become more common—especially in urban environments—so does the need for better safety systems. When a drone fails over a populated area, it can fall as a 75-pound projectile from hundreds of feet in the air. That’s a serious hazard.
This project explores the use of guided parachutes as an injury-mitigation technology. The goal is to reduce the kinetic energy of a falling drone while also steering it away from people and toward safe landing zones.
Project Overview
At NASA Langley Research Center, I designed, built, and tested a prototype guided-parachute system for the NASA Aeronautics Research Mission Directorate – Unmanned Aerial Systems (UAS) Office.
The challenge they presented was clear:
Reduce the impact energy of a 75-pound drone falling from 400 feet—from roughly 30,000 ft·lb to 58 ft·lb, a level considered non-lethal.
My Role
As Lead Research Associate at NASA Langley’s Aerospace Academy, I worked with a team of twelve student engineers and physicists—mechanical, electrical, and aerospace—on a series of projects proposed by the NASA Aeronautics Research Mission Directorate.
My main focus was the development of a kinetic-energy-reduction device for drones operating over populated areas. Over the course of just eight weeks, our team moved through every stage of development:

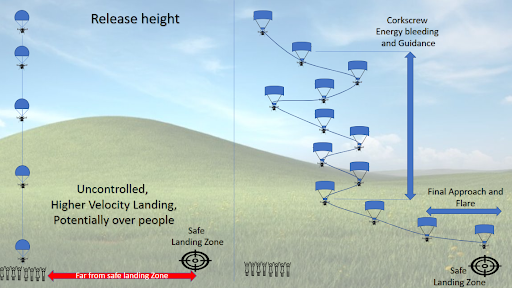
RIGHT: A scaled prototype demonstrating controllable descent, steering right then left, and flaring behavior (executed too early).
- Problem definition and requirements
- Concept research and trade studies
- Detailed design and simulation
- Prototyping, testing, and documentation
Design Trade-Offs
We considered several approaches to energy reduction:
- Airbags
- Auto-rotation
- Landing-gear deformation
- Crumple zones
Most were impractical given weight, complexity, and the need for a bolt-on solution. Auto-rotation, used by helicopters, showed promise but would have required replacing all motors—hardly a retrofit option.
Guided Parachute Concept
Conventional drone parachutes focus on saving the drone, not protecting people.
Our concept went a step further: a steerable parachute that could actively guide a failing drone away from crowds, buildings, or power lines.
The small-scale prototype shown in the GIF above demonstrates the control concept in action. It was dropped from the top of an aircraft hangar (about 80 ft). Upon deployment, it stabilized into a glide, circled left and right on command, and then attempted a soft-landing flare at the end of descent.
Future Scaling
A full-scale version would mount on larger drones already equipped with onboard sensors for autonomous flight. Those sensors—paired with NASA’s existing Safe2Ditch algorithms—could identify safe landing areas and steer the parachute to them automatically.
Reflection
In just eight weeks, we built a working proof-of-concept that combined aerospace design, control theory, and rapid prototyping. It was one of those projects that reminded me how much can be achieved when a small team focuses hard on solving a real, high-stakes problem.