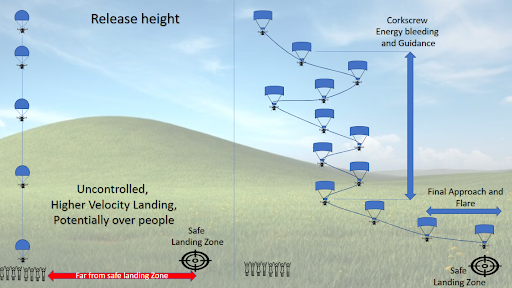
With drone usage constantly expanding there is an increased need for safety equipment, in the case of drone failure over populated areas. This project explores the possibility of using guided parachutes as an injury mitigation technology to reduce kinetic energy while simultaneously steering the failed drone away from populated areas to safe landing zones.
Designed, Constructed, and Tested a prototype system at NASA Langley Research Center
The NASA UAS office tasked the team to reduce the kinetic energy of a 75-pound drone falling from 400 ft down from 30,000 ft-Ib to 58 ft-Ib.
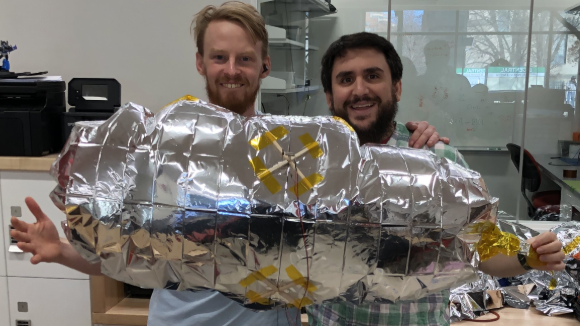
As part of the BU Morphable Bio-Roboics Lab we are developing new propulsion technologies for underwater and airborne use. In order to test their functionality in air, we needed a boyant aiborne testbed that the propulsion system could be connected to.
Designed, Constructed, and Tested a prototype system at Boston University RASTIC
Designed to work in RASTIC's Motion Capture Room for high resolution positioning and control feedback that doesnt require onboard sensors on the blimp
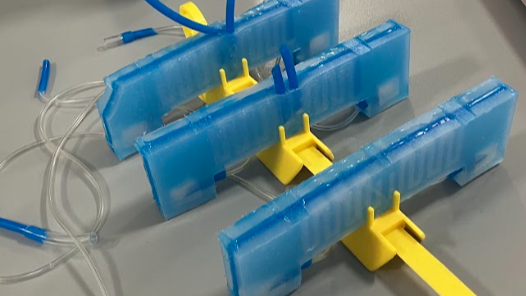
As part of the BU Graduate Level Soft Roboics class developed a competition winning, crawler style robot for an intercollegiate 5 school comptetion.
Designed, Constructed, and Tested a prototype system at Boston University RASTIC
Developed a novel new actuator design, as well as concept of operation, with anisotropic friction based, pnumatically actuated, modular multileg robot.